
2019 Hochwertiger China PP Single Female Union Kugelhahn F für die Bewässerungswasserversorgung PP-Klemmverschraubung

Jetzt haben wir viele hervorragende Mitarbeiter, die sich mit Online-Marketing, Qualitätskontrolle und der Bewältigung problematischer Probleme innerhalb der Herstellungsmethode für 2019 auskennen. wir verstehen einander.Zusätzliches Unternehmen, das Vertrauen kommt dorthin.Unsere Firma ist in der Regel jederzeit für Sie da.
Jetzt haben wir viele hervorragende Mitarbeiter, die sich mit Online-Marketing, Qualitätskontrolle und der Bewältigung schwieriger Probleme im Herstellungsprozess auskennenKugelhähneAngesichts des harten globalen Marktwettbewerbs haben wir eine Markenaufbaustrategie gestartet und den Geist des „menschenorientierten und treuen Dienstes“ aktualisiert, mit dem Ziel, weltweite Anerkennung und nachhaltige Entwicklung zu erlangen.
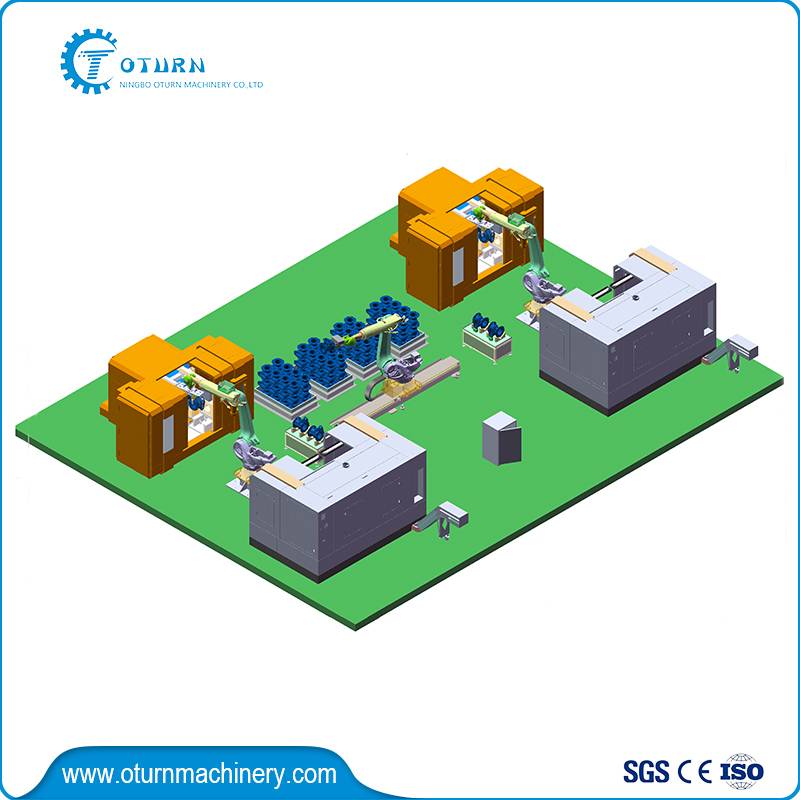
1. Der Bediener platziert die Palette voller Ventilkörperwerkstücke zur Positionierung in den Ladepositionierungsschlitz 1 und den Ladepositionierungsschlitz 2 und platziert das leere Tablett zur Positionierung in den Ladepositionierungsschlitz 1 und den Entladepositionierungsschlitz 2.
2. Die Kamera am Roboter 1 scannt das Werkstück auf der Palette im Zuführpositionierungsschlitz 1, um das Werkstück genau zu positionieren, und das Werkstück 1 wird eingespannt und in der Positionierungsvorrichtung auf dem Puffertisch 1 platziert.
Gleichzeitig greift er das bearbeitete Werkstück 3 (der Roboter 2 hat es gerade von der Werkzeugmaschine 2 gegriffen), fährt zum Entladepositionierplatz 1 und legt es bei Bedarf sauber in die Palette ein.
Die Kamera am Roboter 1 scannt das Werkstück auf der Palette im Zuführpositionierschlitz 2, um das Werkstück genau zu positionieren. Anschließend wird das Werkstück 4 eingespannt und in der Positionierungsvorrichtung auf dem Puffertisch 2 platziert.
Gleichzeitig greift er das bearbeitete Werkstück 6 (der Roboter 3 hat es gerade von der Werkzeugmaschine 4 gegriffen), fährt zum Entladepositionierplatz 2 und legt es bei Bedarf sauber in die Palette ein.
3. Der Roboter 2 spannt das Werkstück 1 vom Puffertisch 1 und läuft zur Werkzeugmaschine 1, greift das fertige Werkstück 2 und spannt das Werkstück 1, läuft zur Werkzeugmaschine 2, greift das fertige Werkstück 3 und spannt das Werkstück 2 , und läuft zum Puffertisch 1. Werkstück auflegen 3. Roboter 2 beendet den Zyklus.
4. Der Roboter 3 greift das Werkstück 4 vom Puffertisch 2 und läuft zur Werkzeugmaschine 3, greift das fertige Werkstück 5 und spannt das Werkstück 4, läuft zur Werkzeugmaschine 4, greift das fertige Werkstück 6 und spannt das Werkstück 5 , und läuft zum Puffertisch 2. Platzieren Sie das Werkstück 6. Roboter 3 beendet den Zyklus.



 Jetzt haben wir viele hervorragende Mitarbeiter, die sich mit Online-Marketing, Qualitätskontrolle und der Bewältigung problematischer Probleme innerhalb der Herstellungsmethode für 2019 auskennen. wir verstehen einander.Zusätzliches Unternehmen, das Vertrauen kommt dorthin.Unsere Firma ist in der Regel jederzeit für Sie da.
Jetzt haben wir viele hervorragende Mitarbeiter, die sich mit Online-Marketing, Qualitätskontrolle und der Bewältigung problematischer Probleme innerhalb der Herstellungsmethode für 2019 auskennen. wir verstehen einander.Zusätzliches Unternehmen, das Vertrauen kommt dorthin.Unsere Firma ist in der Regel jederzeit für Sie da.
2019 Hochwertige China HDPE-Klemmringverschraubungen, PPKugelhähneAngesichts des harten globalen Marktwettbewerbs haben wir eine Markenaufbaustrategie gestartet und den Geist des „menschenorientierten und treuen Dienstes“ aktualisiert, mit dem Ziel, weltweite Anerkennung und nachhaltige Entwicklung zu erlangen.
Senden Sie Ihre Nachricht an uns:
Produktkategorien
-
Günstige Preisliste für pneumatische Edelstahl-S...
-

18 Jahre Fabrik China Ck58 CNC-Schrägbettdrehmaschine ...
-
Fabrik, die China-Schiebetisch-Spindelform herstellt ...
-
Beste Qualität China Universal Horizontal und Ver ...
-

Gute Qualität China CNC-Rohrgewindedrehmaschine (CN ...
-
Preisblatt für China Professional CNC Vertikal...


